Управление автомобильным электромотором с помощью MOSFET NXP
Вступление
Электродвигатель (электромотор) - электрическое устройство, в котором электрическая энергия преобразуется в механическую.
MOSFET (metal-oxide-semiconductor field effect transistor) - полевой МОП (метал-оксид-полупроводник) транзистор, более экономичный, по сравнению с биполярными транзисторами. Иногда МОП-транзисторы называют МДП (металл-диэлектрик-полупроводник).
Существует много разновидностей электромоторов:
Постоянного тока - электромоторы, питание которых осуществляется постоянным током.
- коллекторные электромоторы постоянного тока - электрический мотор, в котором датчиком положения ротора и переключателем тока в обмотках является одно и тоже устройство - щеточно-коллекторный узел. Разновидностями коллекторного электромотора являются: с возбуждением постоянными магнитами, с параллельным включением обмоток возбуждения якоря, с последовательным соединением обмоток возбуждения и якоря, со смешанным соединением обмоток возбуждения и якоря;
- бесколлекторные двигатели постоянного тока (вентильные моторы) - электромоторы, выполненные в виде замкнутой системы с использованием датчика положения ротора (ДПР), системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора);
Переменного тока - электрический мотор, питание которого осуществляется переменным током. Разновидностями электромотора переменного тока являются: синхронный электромотор - ротор вращается синхронно с магнитным полем питающего напряжения, асинхронный электромотор - частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением, однофазные, двухфазные, трехфазные, многофазные;
- шаговые электромоторы - электромоторы, которые имеют конечное число положений ротора. В таких электромоторах положение ротора фиксируется подачей питания на соответствующие обмотки, и переход в другое положение осуществляется путем снятия питания с одних обмоток и передачи его на другие;
- универсальные коллекторные моторы - коллекторные электромоторы, которые могут работать и на постоянном токе и на переменном.
Тенденция развития автомобильной промышленности предъявляет особые требования к комфортабельности, управляемости и безопасности современных автомобилей. Для обеспечения наилучшей управляемости автомобиля требуется большое количество электромоторов, в современных автомобилях бизнес класса и супер карах может использоваться до 30 электромоторов. В перспективе ожидается, что в следующем поколении автомобилей такие особенности будут стандартом для автомобилей среднего класса.
Все эти электромоторы нуждаются в управлении, обычно блоком управления является панель управления автомобиля, такая система требует большого количества медных проводов в электросети автомобиля, которые могут достигать в длину до 4 км, и весить до 20 кг. Такие электросети могут содержать более 1000 проводов, несколько тысяч разъемов и занимать большое количество времени на прокладку. Мало того что, такая система является достаточно дорогой, увеличивает вес автомобиля, что ведет к увеличению расхода топлива, но и создает трудности при прокладке проводов, и даже является не допустимым физически при прокладке до 70-80 проводов, например в дверные петли автомобиля. В настоящее время для включения электромотора, управления направлением вращения или его скоростью используются полупроводниковые ключи, что позволяет использовать более тонкие провода и обеспечить их прокладку в малодоступные места. Наибольшее снижение веса и уменьшения проводов может быть достигнуто мультиплексным включением проводов контролируемых последовательной шиной и использованием протоколов CAN и LIN.
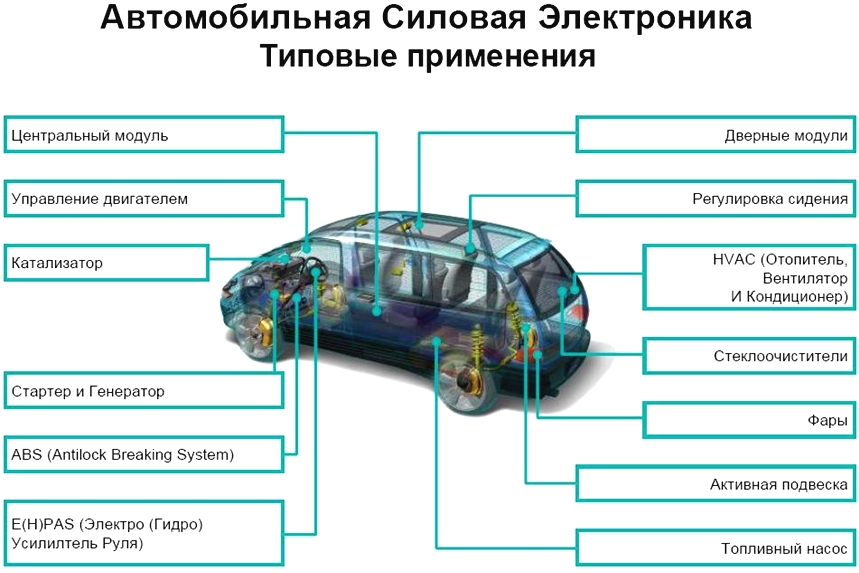
Таблица применения электромоторов в автомобиле
| Применение |
Мощность типовая, Вт |
Номинальный ток, А |
Количество применяемых моторов |
Тип управления |
Количество для управления мотором |
Комментарии |
| Кондиционер |
300 |
25 |
1 |
однонаправленный, с регулировкой скорости |
1 |
Принудительная остановка может потребовать более мощный мотор |
| Вентилятор радиатора |
120-240 |
10-20 |
1 |
однонаправленный, с регулировкой скорости |
1 |
Здесь можно применять щеточный электромотор, требующий от 3 до 6 транзисторов с низким зарядом |
| Электронасос |
100 |
8 |
1 |
однонаправленный |
1 |
|
Дворники:
передние
боковые
задние |
60-100 |
5-8 |
1-2
1
2 |
однонаправленный, с регулировкой скорости |
1 |
Возврат дворников можно осуществлять механически. Это сокращает применение ключей до 2-4 |
Омыватели:
передние
задние |
30-60 |
2,5-5 |
1-2
1-2 |
однонаправленный |
1 |
|
| Стеклоподъемник |
25-120 |
2-10 |
2-4 |
реверсивный |
4 |
|
| Люк |
40-100 |
3,5-8 |
1 |
реверсивный |
4 |
|
| Сидение (движение вперед/назад, подъем, наклон, поясничная поддержка) |
50 |
4 |
4-16 |
реверсивный |
4 |
|
| Ремень безопасности |
50 |
4 |
2-4 |
реверсивный |
4 |
|
| Крышка подъемных головных фар |
50 |
4 |
2 |
реверсивный |
4 |
|
| Антенна радио |
25 |
2 |
1 |
реверсивный |
4 |
|
| Активатор двери |
12-36 |
1-3 |
6-9 |
реверсивный |
4 |
|
| Регулятор зеркал |
12 |
1 |
2 |
реверсивный |
4 |
|
Типы электромоторов используемые в автомобилях
Электромоторы, разработанные для автомобильной промышленности представляют собой попытку достижения оптимального компромисса между противоречивыми требованиями. Они должны удовлетворяться требованиям характеристик момента/скорости вращения, при условии ограниченного количества используемого материала, места и цены.
Существуют четыре основных семейства электромоторов постоянного тока (DC motors), которые потенциально могут использоваться в автомобильной промышленности.
Двухобмоточный коллекторный электродвигатель постоянного тока
Широко используются электромоторы выполненные традиционным способом с намоткой на статоре, питание ротора осуществляется через щетки и мультисегментный коммутатор (рис. 1).
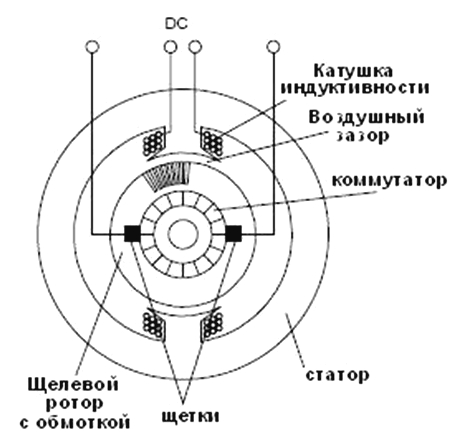
Рисунок 1. Двухобмоточный коллекторный индуктивный электромотор постоянного тока
Однако недавно они были в значительной степени заменены электродвигателями с постоянным магнитом. Примечательно то, что они имеют квадратурные характеристики. Они могут быть с сериесной обмоткой (с высокими характеристиками момента/скорости вращения при запуске, но при этом иметь тенденцию "убегать" в режиме без нагрузки), с шунтовой обмоткой (с относительно пологими характеристиками момента/скорости вращения) или реже со смешанным возбуждением.
Коллекторный электромотор постоянного тока с постоянным магнитом
В настоящее время это самый востребованный электромотор в современных автомобилях. В таком электродвигателе постоянный магнит формирует статор, ротор состоит из прорезанных листов стали с намоткой медных проводов (рис.2). Такие моторы имеют более легкий ротор и меньшие габариты, чем двухобмоточные коллекторные электромоторы. Типичные отношения веса между коммутаторным электромотором и коллекторным составляет: медного кабеля 1:10, магнита 1:7, ротора 1:2,5, корпус 1:1. Но преимуществом коммутаторных электромоторов является наличие линейных характеристик момента/скорости вращения (рис.3) для типичных кривых, связывающих момент вращения, скорость, поток и эффективность. Коллекторные электромоторы, как правило, используются на скорость вращения ниже 5000 оборотов в минуту, типовая индуктивность составляет 100-500 микроГенри, что намного ниже, чем у коллекторных электродвигателей. При этом коммутаторные электродвигатели изготавливаются из новых материалов (например, неодимовый ферробор), усиливающих эффективность электродвигателя при меньших размерах.
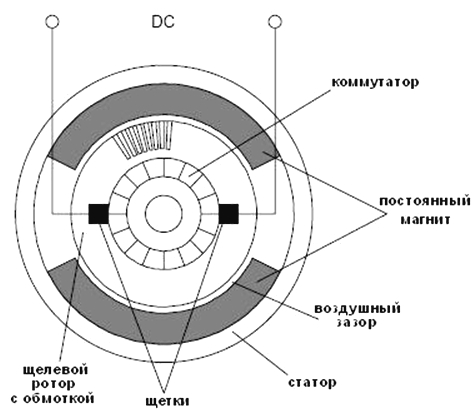
Рисунок 2. Коллекторный электромотор постоянного тока с постоянным магнитом
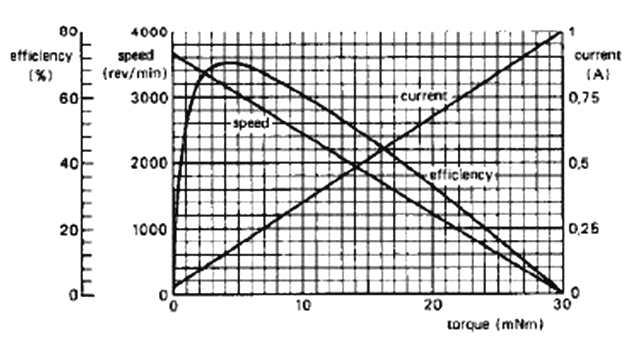
Рисунок 3. Характеристик момента/скорости вращения двухобмоточного коллекторного и коллекторного электромотора с постоянным магнитом
Бесколлекторный электромотор постоянного тока
Несмотря на то, что в системах гидроуправления с приводом от электромотора бесколлекторные электродвигатели постоянного тока еще широко не используются в автомобилях, они рассматриваются для использования в специализированных приложениях, например, топливный насос, где их свойство отсутствия искры, делает их очень привлекательными. Они состоят из обмотки статора и ротора на постоянном магните (рис. 4).
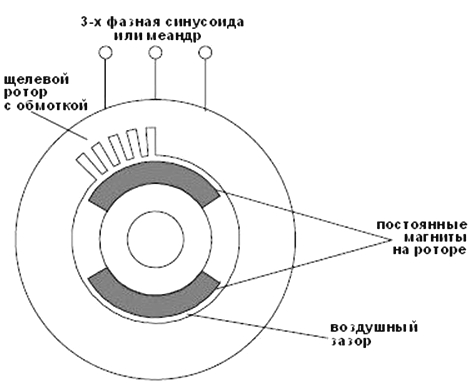
Рисунок 4. Бесколлекторный электромотор постоянного тока
Таким образом, их наименование подразумевает отсутствие механического коммутатора и щеток, что подразумевает отсутствие шума, изнашивание щеток и связанное с этим обслуживание. Но вместо этого они зависят от электроники, поскольку требуют постоянный контроль положения ротора, который может включать в себя магниторезистивные датчики, датчики Холла или не возбуждающие сигналы в обмотке. Благодаря их малому весу, малоинерционному ротору они обеспечивают высокую производительность, высокую плотность мощности, высокую скорость и ускорение, они могу использоваться в качестве сервосистем.
Коммутируемый синхронный электромотор
Эти электромоторы являются бифилярным эквивалентом бесколлектрного электромотора с постоянным магнитом (рис. 5), с подобными преимуществами и ограничениями. Напомним, что такие электродвигатели еще не нашли широкое применение, они являются концептуальным решением для замены некоторых электродвигателей имеющих большие габариты и массу, в таких автомобильных приложениях, как радиатор и кондиционер, где их соотношение большой мощности и веса является весьма привлекательным. Коммутируемые синхронные двигатели могут так же использоваться, как шаговые двигатели в таких приложениях, как антиблокировочная система (ABS) и управление дроссельной заслонкой.
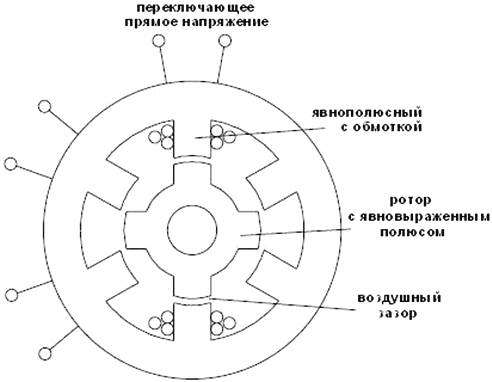
Рисунок 5. Коммутируемый синхронный электромотор
Конфигурация привода электромотора
Тип двигателя имеет значительное влияние на конфигурацию схемы управления электромотором. Два семейства электромоторов постоянного тока, коммутируемые и коллекторные, нуждаются в различных схемах управления. Не смотря на это можно подобрать MOSFET транзисторы, которые способны работать одинаково эффективно с обоими семействами моторов.
Коллекторный электромотор
Оба типа с постоянным магнитом или двухобмоточный электромотор могут управляться посредством коммутации с последовательной подачей напряжения питания (рис. 6) .
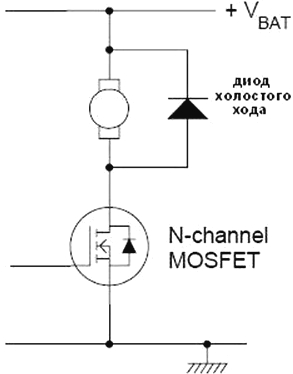
Рисунок 6. Ключевая схема коллекторного электромотора
Раньше традиционно в схемах управления электромоторами использовались реле, но в связи с их не достаточной долговечностью, габаритами и надежностью (особенно в условиях вибрации) и цены, основную массу в схемах управления получили полупроводниковые элементы способные обеспечивать основные показатели, такие как: низкое падение напряжения, малое управляющее напряжение, устойчивость к вибрациям. Силовые MOSFET транзисторы так же обладают: низким сопротивлением открытого канала несколько мОм, малой мощностью рассеяния несколько мВт, и необходимого напряжения, в несколько вольт (практически при нулевом токе), затвора.
После того как электромотор выключается, он может продолжать вращаться, и в этот момент электромотор является источником напряжения и механическая энергия вращения, должна быть рассеяна или трением или должна быть преобразована в электроэнергию и возвращена в источник через встроенный в MOSFET встречный диод. Если электромотор не вращается после отключения, то в таком случае он будет являться индуктивной нагрузкой и кратковременное переходное напряжение ключа нижнего плеча может вызвать лавинный пробой MOSFET транзистора. В зависимости от магнитуды энергии накопленной в магнитном поле и способности MOSFET транзистора антилавинный диод, включенный параллельно с электромотором может требоваться, может не требоваться.
Так в первом приближении получаем, если:
1/2LmI2m < WDSS
в таком случае диод не требуется.
Изменение полярности питания коллекторного электромотора изменяет направление его вращения. В этом случае обычно требуется H-мостовая схема включения MOSFET транзисторов (рис. 7). В таком случае встроенный диод, являющийся неотъемлемой частью MOSFET транзистора, означает, что никакие внешние диоды не требуются. Нужно отметить, что в такой схеме включения последовательно с электромотором установлено два элемента. Для поддержания одинакового уровня падения напряжения на каждом MOSFET транзисторе их количество должно быть удвоено. С четырьмя MOSFET транзисторами можно обеспечить реверсивное вращение, для нереверсивного вращения электромотора в H-мостовой схеме необходимо восемь транзисторов.
Уменьшение управляющего напряжения питания вызывает уменьшение напряжения на электромоторе и как следствие его скорость. В случае включения электромотора по H-мостовой схеме транзисторы 1 и 4 (TR1, TR4) могут быть использованы для управления направлением, в то время как уменьшенный сигнал (типовое 20 кГц) приложен к транзисторам 3 или 2 (TR3, TR2). В тех случаях, когда необходимо изменить направление вращения, лучше всего использовать логические вентили, так что бы система выполняла условие, где TR1, TR2, TR3 и TR4 выключены.
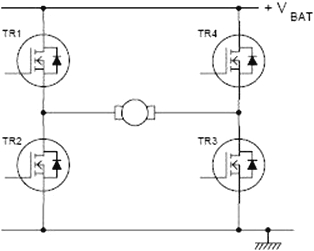
Рисунок 7. H-мостовая схема включения MOSFET транзисторов
Коммутируемый полем электромотор
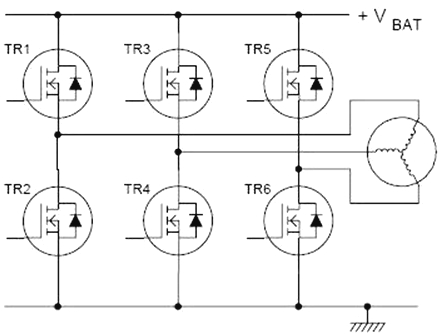
Рисунок 8. Управление бесколлекторным электромотором с помощью MOSFET транзисторов
Для вращения бесколлекторного электромотора с постоянным магнитом в типовой схеме управления используется шесть ключей генерирующих магнитное поле (рис. 8). Однако некоторые электромоторы, которые работают с небольшими мощностями магнитного поля, могут управляться тремя ключами, на рисунке 9 показан один из вариантов схемы ключа нижнего плеча такого мотора.
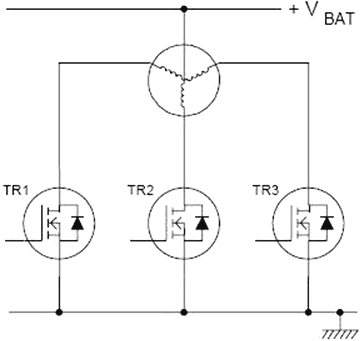
Рисунок 9. Управление бесколлекторным электромотором с помощью 3-х MOSFET транзисторов
Такая же схема может быть построена с ключом верхнего плеча. Для переключения синхронного мотора можно использовать минимум четыре или максимум двенадцать MOSFET транзисторов для генерации магнитного поля, схема переключения на четырех ключах показана на рис. 10.
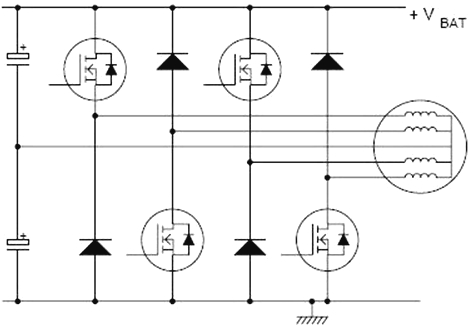
Рисунок 10. Управление бесколлекторным синхронным электромотором с помощью 4-х MOSFET транзисторов
Скорость и направление всех переключаемых полем моторов управляется путем регулирования времени импульсов тока. В случае для бесколлекторных электромоторов постоянного тока тактовые импульсы могут быть организованы с применением специализированной микросхемы NXP TDA5140 или TDF5140. Требуемое определение положения ротора может осуществляться посредством магниторезистивного датчика, определяющего на какую последующую обмотку необходимо подать напряжение. По сравнению с коллекторными моторами постоянного тока переключение энергии для бесколлекторного мотора может быть быстрее, потому что они могут переключаться в каждой полуволне тока.
Регулировка скорости вращения посредством широтно-импульсного модулятора (ШИМ) в дальнейшем требует увеличения скорости коммутации. MOSFET транзисторы NXP разработаны таким образом что бы и ключ и встроенный диод обеспечивали максимальную производительность на высоких частотах и напряжениях, которые возникают в автомобилях.
Драйвер верхнего плеча
Часто в автомобилях требуется, что бы ключи были подключены к положительному полюсу батареи связанной через общее шасси. Отрицательное заземление уменьшает коррозию и делает более безопасным нижнее плечо во время перегрузок или замены. К тому же, рассматривается H-мост когда верхнее плечо, конечно же содержит ключи верхнего плеча.
Существуют два варианта MOSFET транзисторов для ключей верхнего плеча:
P-канальные ключи. Это упрощенные схемы управления электромотором, которым нужно только положительное питание (рис. 11). К сожалению, P-канальные транзисторы требуют почти в три раза большую область полупроводника для получения соизмеримого сопротивления открытого канала как в N-канальных MOSFET, что ведет к удорожанию транзистора. К тому же P-канальные MOSFET не имеют возможности работы с сигналами логического уровня.
N-канальные ключи. Для обеспечения полного открытия канала необходимо подавать положительное управляющее напряжение выше 10 В для стандартных MOSFET или выше 5 В для MOSFET с логическим уровнем. Такое напряжение, можно получить при помощи дополнительного источника напряжения, с использованием дополнительных элементов обвязки, что вызывает удорожание системы.
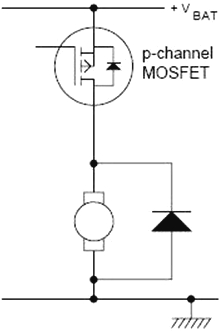
Рисунок 11. P-канальный ключ верхнего плеча
Дополнительное управление может быть получено за счет локального источника питания, как показано на рис.12. Генератор (например, на основе микросхемы NXP серии ICM7555) вырабатывает меандр амплитудой 12 В и частотой 100 кГц. Затем удвоитель напряжения увеличивает его примерно в два раза относительно напряжения источника питания. Такое построение соответствует построению источника постоянного тока или модуляторам управления.
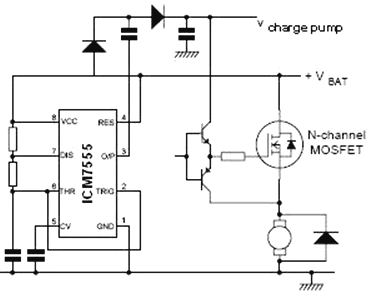
Рисунок 12. N-канальный ключ верхнего плеча с подкачкой
Альтернативный вариант для модуляторов H-моста, с использованием непосредственно MOSFET, генерацией управляющего напряжения и цепью обратной связи показан на рис. 13. Эту цепь можно использовать в диапазоне коэффициента заполнения от 5 до 95%. Стабилитрон, используемый в данной схеме необходим для ограничения импульсных скачков напряжения, которые могут поступить на вспомогательную линию.
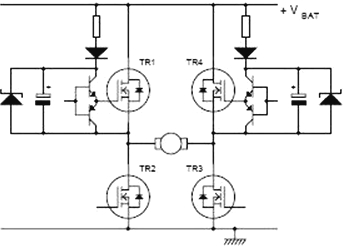
Рисунок 13. Мостовая схема управления с обратной связью
TOPFET верхнего плеча
Идеальный ключ верхнего плеча для управления электромотором, претендующим на номер один, является тот, который способен включаться и выключаться сигналом логической схемы и быть полностью защищенным против короткого замыкания электромотора, перегрева и передавать информацию о состоянии в микроконтроллер.
NXP имеет в своем портфолио ряд TOPFET транзисторов для ключа верхнего плеча, серии BUK. Диапазон сопротивления открытого канала RDSon, которых лежит в пределах 38-220 мОм, со встроенным заземляющим резистором или без него. Они имеют цепь подкачки и сдвига уровня, заземляющий резистор, термальную защиту и возможность обмена информацией о состоянии ключа, таких как короткое замыкание или обрыв цепи. Рисунок 14 показывает простоту схемы управления электромотором при использовании TOPFET транзистора NXP.
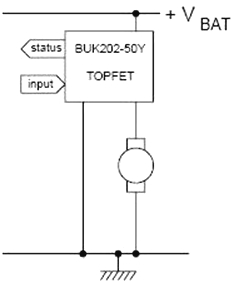
Рисунок 14. TOPFET верхнего плеча
Ток в цепи электромотора
Существуют пять вариантов тока, которые могут протекать в цепи электромотора:
Номинальный. Это установившийся уровень максимума тока, при котором мотор функционирует в нормальных условиях, характеризующиеся низким уровнем и большой продолжительностью.
Перегрузка. Это уровень тока, при котором мотор функционирует в условиях повышенной нагрузки, но способен выполнять свою функцию без блокировки. Такой режим работы не обязательно вызывает состояние отказа, некоторые приложения, где мотор используется редко и для коротких промежутков времени, может быть использован меньший мотор, чем был бы необходим для непрерывного режима работы. В таких случаях номинальный ток часто может быть током перегрузки. Ток перегрузки зачастую бывает в два раза больше номинального тока и продолжаться от 5 до 60 секунд.
Выброс - или пусковой ток превышает номинальный ток в 5-8 раз и может длиться до 100 мс (рис. 15). Стартовый крутящий момент мотора определяется этим током, так если требуется высокий крутящий момент, то схема управления не должна ограничивать ток, и наоборот, если стартовый крутящий момент не критичен, тогда ток может быть ограничен техническими средствами с использованием более миниатюрных элементов и с большими разбросами параметров.
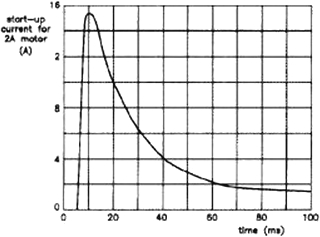
Рисунок 15. Выброс тока при включении в 2 А моторе
Блокировка - когда мотор не может вращаться, проходящий ток ограничен только сопротивлением катушки мотора и ключом. При этом ток может протекать через обмотку в 5-8 раз дольше. Рис. 16 показывает, что ток протекающий через остановленный электродвигатель постепенно падает, как температура, и, следовательно, сопротивление электромотора уменьшается, в то время как ток на MOSFET транзисторе пропорционально возрастает.
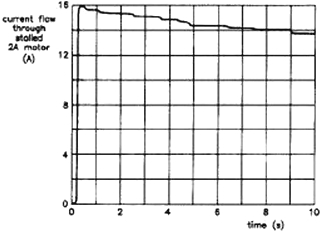
Рисунок 16. Ток при блокировке в 2 А моторе
Короткое замыкание - если мотор закорочен, тогда ток ограничен только сопротивлением ключа и проводом катушки. Оптимальным средством защиты в таком случае является плавкий предохранитель. Если другие способы защиты не используются, тогда предохранитель выбирается из условия I2t, где t - время протекания тока.
Важно иметь ввиду, что элементы, используемые в цепи управления, должны быть рассчитаны на работу с токами протекающими в цепи. С некоторыми видами коммутационных устройств приходится руководствоваться лишь абсолютным максимумом тока. Часто это приводит к тому, что в схеме устанавливаются мощные и дорогие устройства. Характеристики MOSFET транзисторов, в частности их термические ограничения области безопасной работы (не вторичного пробоя), позволяют разработчику устанавливать элемент с оптимальными параметрами близкими к соотвествующим режимам работы схемы управления.
Технические требования
Напряжение
Самое высокое напряжение при нормальном функционировании, с которым приходится сталкиваться составляет 16 В, стартовый скачок напряжения может достигать 22 В. В случаях, когда батарея отсоединена от генератора переменного тока, управляющее напряжением может достигать 50 В (при условии отсутствия внешней защиты), или 60 В, в случае 24 В напряжения бортовой сети транспортных средств (табл. 1). Таким образом, требуемое нормальное напряжение 50/60 В, однако на шину питания в транспортном средстве влияет много помех. Переключение индуктивных нагрузок производит выбросы напряжения и колебания обеих полярностей. Они могут быть одиночными или серийными и иметь магнитуду 100 В и более и продолжительностью порядка 1 мс.
Таблица 1
| Диапазон напряжений |
Причина |
| >50 (60)* |
Скачки обратной связи |
| 30-50 |
Нагрузка при выключении |
| 22-30 |
Импульс перенапряжения при включении индуктивной нагрузки |
| 16-22 (32-40)* |
Скачок при запуске двигателя или неисправный регулятор |
| 10,5-16 (20-32)* |
Нормальный режим работы |
| 8-10,5 |
При неисправности генератора |
| 6-8 (9-12)* |
Запуск двигателя внутреннего сгорания |
| 0-6 (0-6)* |
Запуск дизельного двигателя |
| отрицательное |
Импульсы отрицательных напряжений, переполюсовка |
* 24 В напряжение питания
При выборе MOSFET транзистора важно учитывать допустимую устойчивость к таким воздействиям, или выбирать элемент исходя из того что бы напряжения истока VDS было рассчитано на скачки до 50/60 В. Для защиты от перенапряженный выше заданных параметров необходимо обеспечивать защиту внешними элементами.
Температура
Температура окружающей среды салона автомобиля лежит в пределах -40 - +85° С, и -40 - +125° С под капотом автомобиля. Все MOSFET транзисторы NXP рассчитаны на рабочую температуру до Tjmax = 175° С.
L2FET
Напряжение питания в автомобиле которое вырабатывает аккумуляторная батарея около 12 В (номинальное), которое может варьироваться в пределах от 10,5 В до 16 В в обычном режиме работы. Это важно учитывать при выборе MOSFET транзистора, для удовлетворения необходимых параметров его полного переключения, при этом не забывать, что для ключа верхнего плеча необходимое напряжение можно получить от цепи подкачки или цепи обратной связи.
Для включения MOSFET транзистора обычно достаточно подать напряжение на затвор 6 В, но для достижения минимального сопротивления транзистора необходимо напряжение 10 В. Таким образом, разброс напряжения затвора VGS между доступным и необходимым может быть весьма ограниченным в автомобильной электронике.
Одним из способов решения проблемы состоит в использовании MOSFET транзисторов с логическим уровнем (L2FET), например, такой как PHT11N06LT, который достигает минимальное сопротивление 40 мОм при напряжении VGS 5 В.
NXP Semiconductors на рынке MOSFET транзисторов
В настоящее время MOSFET транзисторы, являются одними из самых востребованных элементов в современной автомобильной электронике. В условиях жесткой конкуренции и существующих требований к высокой энергоэффективности оборудования разработчики стремятся уменьшить габариты, энергопотребление и себестоимость конечной продукции.
Компания NXP, являясь одним из лидеров по производству MOSFET транзисторв для автомобильной промышленности, предлагает широкий выбор транзисторов, в котором насчитывается около 250 наименований элементов. Благодаря высокому качеству и широкому портфолио MOSFET транзисторов, компания NXP предоставляет возможность разработчикам электроники подобрать максимально удовлетворяющий их задачам элемент. Краткий перечень и характеристики MOSFET транзисторов NXP для применения в автомобильной электронике приведен в таблице.
| P/N |
Корпус |
IDмакс, А |
QGDтип. |
RDSonмакс [VGS = 10 В] мОм |
RDSonмакс [VGS = 4,5 В] мОм |
RDSonмакс [VGS = 5 В] мОм |
VDSмакс В |
| BUK7511-55A |
TO-220AB |
75 |
- |
11 |
- |
- |
55 |
| BUK7611-55A |
D2PAK |
75 |
- |
11 |
- |
- |
55 |
| BUK754R3-75C |
TO-220AB |
100 |
- |
4.3 |
- |
- |
75 |
| BUK7E4R3-75C |
I2PAK |
100 |
- |
4.3 |
- |
- |
75 |
| BUK7222-55A |
DPAK |
48 |
- |
22 |
- |
- |
55 |
| BUK9840-55 |
SOT223 |
10.7 |
- |
- |
- |
40 |
55 |
| BUK9510-55A |
TO-220AB |
100 |
28 |
9 |
11 |
10 |
55 |
| BUK9610-55A |
D2PAK |
100 |
28 |
9 |
11 |
10 |
55 |
| BUK9E06-55B |
I2PAK |
75 |
22 |
- |
- |
6 |
55 |
| BUK9Y11-30B |
SOT669 |
59 |
5.4 |
- |
12 |
11 |
30 |
| BUK7Y13-40B |
SOT669 |
58 |
5 |
13 |
- |
- |
40 |
| BUK9628-100A |
D2PAK |
49 |
- |
27 |
- |
228 |
100 |
| BUK9E3R2-40B |
I2PAK |
100 |
37 |
- |
- |
3.2 |
40 |
| BUK9907-40ATC |
TO-220 |
75 |
- |
6.2 |
- |
7 |
40 |
| BUK9Y19-55B |
SOT669 |
46 |
8 |
- |
- |
19 |
55 |
| BUK764R0-75C |
D2PAK |
100 |
- |
4 |
- |
- |
75 |
| BUK9E04-30B |
I2PAK |
75 |
22 |
- |
- |
4 |
30 |
| BUK6213-30A |
DPAK |
55 |
14 |
13 |
- |
- |
30 |
Вывод
Несмотря на жесткие требования предъявляемые к MOSFET транзисторам для применения в схемах управления электромоторами автомобиля: низкая стоимость и высокая надежность, и большое разнообразие типов и конфигураций моторов, компания NXP предлагает оптимальные решения для применения в схемах управления электромоторами. Комбинация высоких технических характеристик и низкая стоимость, MOSFET транзисторов NXP делают их универсальным продуктом для применения в автомобильной электронике.
Егоров Алексей,
Компания Гамма Санкт-Петербург
| 

